Projekt
Prototyphafte Entwicklung eines Driverless Roboters
Projekt Geodatenfusion
Details
- Extern/e Autor:in
- Joseph Maierbacher
- Intern/e Betreuer:in
- Prof. Dr. Thomas Abmayr
- Abschluss
- Projekt
- Studiengang
- Angewandte Geodäsie und Geoinformatik
- Jahr
- 2026
- Fakultät
- Fakultät für Geoinformation
- Status
- abgeschlossen
- Themengruppe
- Navigation
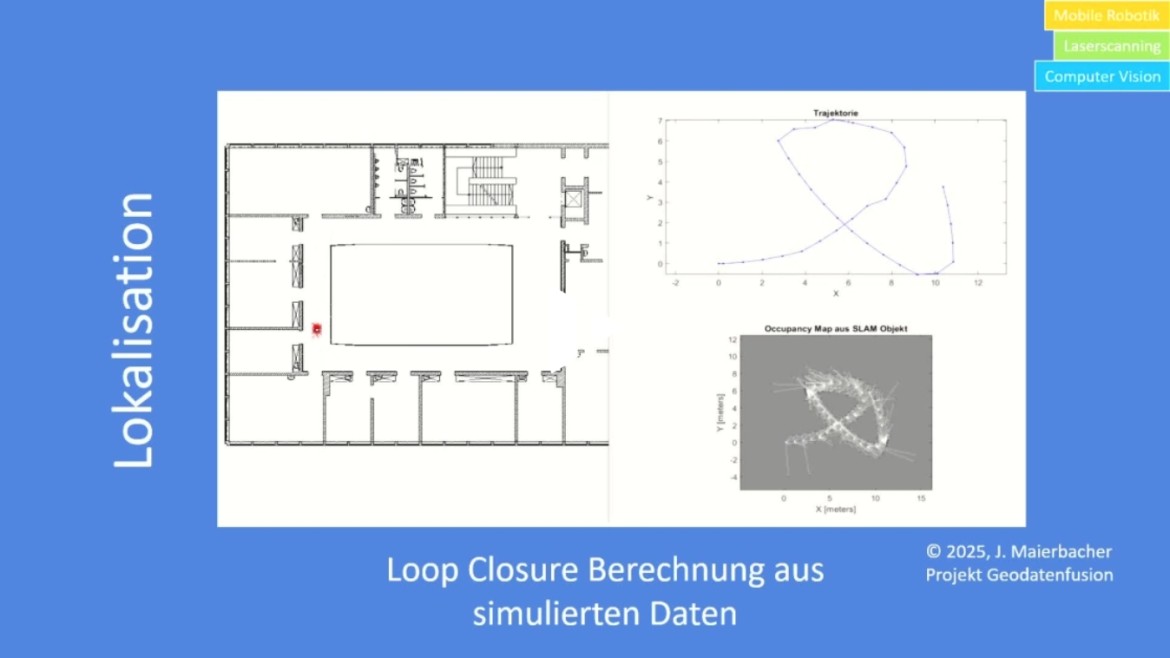
Ziel des Projektes ist es, den Prototypen eines Roboters zu entwickeln, der ein Gebäude autonom abfahren und diese abgefahrenen Bereiche mittels seiner Range Sensoren in einer Karte darstellen kann.
In dem Video wird gezeigt, wie es bei der zugrunde liegenden Koppelnavigation zu Fehlern aufgrund der Drift kommt und wie die daraus resultierende fehlerbehaftete Kartierung nach vollendeter loop closure wieder korrigiert werden kann.
Das Projekt wurde in Matlab und unter Verwendung der Simulationssoftware MobileSim von Mobile Robots durchgeführt.